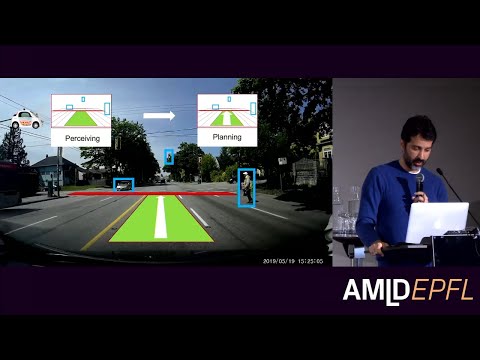
In this talk, we will revisit the 3 pillars of autonomous driving: perception, prediction, and planning. There is a general trend to address these pillars with fully data-driven methods (e.g, AV2.0). We will discuss how these pillars could still benefit from prior knowledge towards a more interpretable AI driven solution.
Download the slides for this talk.Download ( PDF, 39526.0 MB)